Published : 2025-11-10
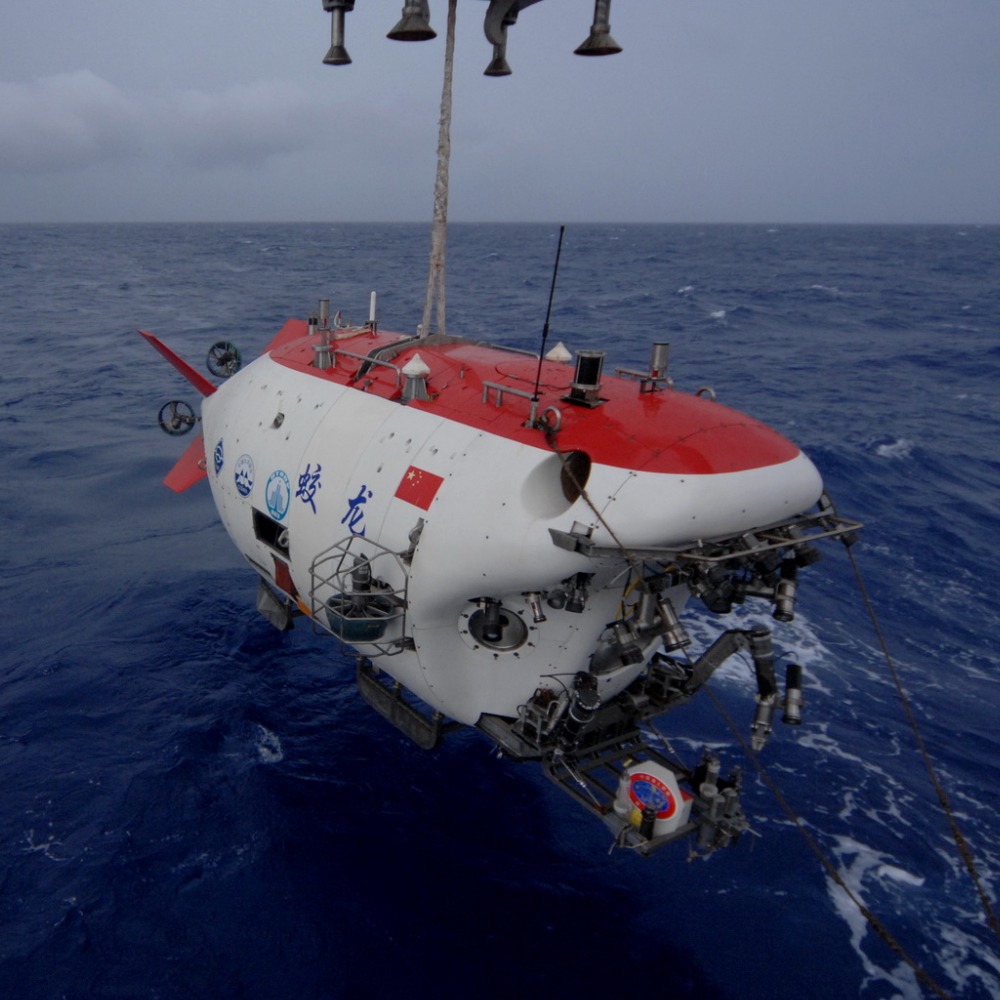
On 10 November 1994, China's first untethered underwater robot, the "Explorer" (探索者號), was successfully developed and passed expert acceptance review.
The Explorer is 4.4m long, 0.8m wide, and 1.5m high, with a weight of 2.2 tonnes, and is an untethered underwater robot that integrates search and survey functions.
The entire robot is divided into two parts, an above-water unit and an underwater unit. It is composed of a vehicle system, an electronic control system, an acoustic system, a navigation system, a surface support system, and a power system, involving numerous high-tech fields such as autonomous driving, underwater acoustic communication, image compression and processing, positioning, navigation and control, computer architecture, multi-sensor fusion, artificial intelligence, high-efficiency energy hydrodynamics and deep diving technology, and surface launch and recovery technology.
The Explorer is powered by domestically produced rechargeable lead-acid batteries and is equipped with seven sonar systems. Its operational range can reach 12 nautical miles, with an endurance of up to six hours and a maximum forward speed of 7.5 km/h.
It is not only capable of recovery in Sea State 4 conditions, but can also search for targets in designated maritime areas while recording data and sonar images. Furthermore, it can observe, photograph, and film submerged wreckage, with the added capability of autonomous obstacle avoidance.
In addition, the Explorer has underwater acoustic communication capabilities, allowing it to transmit required data and images to be displayed on the surface monitoring console.
As the Explorer is equipped with these multiple functions, it therefore has broad application prospects in areas such as underwater engineering, offshore oil and submarine mineral resource development, marine scientific research, and seabed salvage and rescue.
After multiple sea trials, the overall functions and main technical performance indicators of the Explorer were considered to have reached the advanced level of similar international underwater robots of the 1990s.
It successfully dived to a depth of 1,000 metres near the Xisha Islands, shedding the cable that connected it to the mother ship. This represented a leap from tethered to untethered operation, establishing it as a pioneer in China's quest to reach the deep ocean.
The successful development of the Explorer greatly narrowed the gap between China and developed countries in related fields, and also marked the maturing of China's underwater robot technology, making an important contribution to the nation's exploration and development of marine resources.